еЗ†дљХеПШжНҐ
еЗ†дљХеПШжНҐеПѓдї•зЬЛжИРеЫЊеГПдЄ≠зЙ©дљУпЉИжИЦеГПзі†пЉЙз©ЇйЧідљНзљЃжФєеПШпЉМжИЦиАЕиѓіжШѓеГПзі†зЪДзІїеК®гАВ
еЗ†дљХињРзЃЧйЬАи¶Бз©ЇйЧіеПШжНҐеТМзБ∞еЇ¶зЇІеЈЃеАЉдЄ§дЄ™ж≠•й™§зЪДзЃЧж≥ХпЉМеГПзі†йАЪињЗеПШжНҐжШ†е∞ДеИ∞жЦ∞зЪДеЭРж†ЗдљНзљЃпЉМжЦ∞зЪДдљНзљЃеПѓиГљжШѓеЬ®еЗ†дЄ™еГПзі†дєЛйЧіпЉМеН≥дЄНдЄАеЃЪдЄЇжХіжХ∞еЭРж†ЗгАВињЩжЧґе∞±йЬАи¶БзБ∞еЇ¶зЇІеЈЃеАЉе∞ЖжШ†е∞ДзЪДжЦ∞еЭРж†ЗеМєйЕНеИ∞иЊУеЗЇеГПзі†дєЛйЧігАВжЬАзЃАеНХзЪДжПТеАЉжЦєж≥ХжШѓжЬАињСйВїжПТеАЉпЉМе∞±жШѓдї§иЊУеЗЇеГПзі†зЪДзБ∞еЇ¶еАЉз≠ЙдЇОжШ†е∞ДжЬАињСзЪДдљНзљЃеГПзі†пЉМиѓ•жЦєж≥ХеПѓиГљдЉЪдЇІзФЯйФѓйљњгАВињЩзІНжЦєж≥ХдєЯеПЂйЫґйШґжПТеАЉпЉМзЫЄеЇФжѓФиЊГе§НжЭВзЪДињШжЬЙдЄАйШґеТМйЂШйШґжПТеАЉгАВ
жПТеАЉзЃЧж≥ХжДЯиІЙеП™и¶БдЇЖиІ£е∞±еПѓдї•дЇЖпЉМеЫЊеГПе§ДзРЖдЄ≠жѓФиЊГйЬАи¶БзРЖиІ£зЪДињШжШѓз©ЇйЧіеПШжНҐгАВ
з©ЇйЧіеПШжНҐ
з©ЇйЧіеПШжНҐеѓєеЇФзЯ©йШµзЪДдїње∞ДеПШжНҐгАВдЄАдЄ™еЭРж†ЗйАЪињЗеЗљжХ∞еПШжНҐзЪДжЦ∞зЪДеЭРж†ЗдљНзљЃпЉЪ

жЙАдї•еЬ®з®ЛеЇПдЄ≠жИСдїђеПѓдї•дљњзФ®дЄАдЄ™2*3зЪДжХ∞зїДзїУжЮДжЭ•е≠ШеВ®еПШжНҐзЯ©йШµпЉЪ
дї•жЬАзЃАеНХзЪДеє≥зІїеПШжНҐдЄЇдЊЛпЉМеє≥зІїпЉИb1,b2пЉЙеЭРж†ЗеПѓдї•и°®з§ЇдЄЇпЉЪ

еЫ†ж≠§пЉМеє≥зІїеПШжНҐзЪДеПШжНҐзЯ©йШµеПКйАЖзЯ©йШµиЃ∞дЄЇпЉЪ

зЉ©жФЊеПШжНҐпЉЪе∞ЖеЫЊеГПж®™еЭРж†ЗжФЊе§ІпЉИжИЦзЉ©е∞ПпЉЙsxеАНпЉМзЇµеЭРж†ЗжФЊе§ІпЉИжИЦзЉ©е∞ПпЉЙsyеАНпЉМеПШжНҐзЯ©йШµеПКйАЖзЯ©йШµдЄЇпЉЪ

йАЙжЛ©еПШжНҐпЉЪеЫЊеГПзїХеОЯзВєйАЖжЧґйТИжЧЛиљђaиІТпЉМеЕґеПШжНҐзЯ©йШµеПКйАЖзЯ©йШµпЉИй°ЇжЧґйТИйАЙжЛ©пЉЙдЄЇпЉЪ

OpenCVдЄ≠зЪДеЫЊеГПеПШжНҐеЗљжХ∞
еЯЇжЬђзЪДжФЊе∞ДеПШжНҐеЗљжХ∞пЉЪ
void cvWarpAffine(
const CvArr* src,//иЊУеЕ•еЫЊеГП
CvArr* dst, //иЊУеЗЇеЫЊеГП
const CvMat* map_matrix, //2*3зЪДеПШжНҐзЯ©йШµ
int flags=CV_INTER_LINEAR+CV_WARP_FILL_OUTLIERS, //жПТеАЉжЦєж≥ХзЪДзїДеРИ
CvScalar fillval=cvScalarAll(0) //зФ®жЭ•е°ЂеЕЕиЊєзХМе§ЦзЪДеАЉ
);еП¶е§ЦдЄАдЄ™жѓФиЊГз±їдЉЉзЪДеЗљжХ∞жШѓcvGetQuadrangleSubPixпЉЪ
void cvGetQuadrangleSubPix(
const CvArr* src, //иЊУеЕ•еЫЊеГП
CvArr* dst, // жПРеПЦзЪДеЫЫ茺嚥
const CvMat* map_matrix //2*3зЪДеПШжНҐзЯ©йШµ
);ињЩдЄ™еЗљжХ∞зФ®дї•жПРеПЦиЊУеЕ•еЫЊеГПдЄ≠зЪДеЫЫ茺嚥пЉМеєґйАЪињЗmap_matrixеПШжНҐе≠ШеВ®еИ∞dstдЄ≠пЉМдЄОWarpAffineеПШжНҐжДПдєЙзЫЄеРМпЉМ
еН≥еѓєеЇФжѓПдЄ™зВєзЪДеПШжНҐпЉЪ

WarpAffineдЄО GetQuadrangleSubPix дЄНеРМзЪДеЬ®дЇОcvWarpAffine и¶Бж±ВиЊУеЕ•еТМиЊУеЗЇеЫЊеГПеЕЈжЬЙеРМж†ЈзЪДжХ∞жНЃз±їеЮЛпЉМжЬЙжЫіе§ІзЪДиµДжЇРеЉАйФАпЉИеЫ†ж≠§еѓєе∞ПеЫЊеГПдЄН姙еРИйАВпЉЙиАМдЄФиЊУеЗЇеЫЊеГПзЪДйГ®еИЖеПѓдї•дњЭзХЩдЄНеПШгАВиАМ cvGetQuadrangleSubPix еПѓдї•з≤Њз°ЃеЬ∞дїО8дљНеЫЊеГПдЄ≠жПРеПЦеЫЫ茺嚥еИ∞жµЃзВєжХ∞зЉУе≠ШеМЇдЄ≠пЉМеЕЈжЬЙжѓФиЊГе∞ПзЪДз≥їзїЯеЉАйФАпЉМиАМдЄФжАїжШѓеЕ®йГ®жФєеПШиЊУеЗЇеЫЊеГПзЪДеЖЕеЃєгАВ
еЃЮиЈµпЉЪеЫЊеГПжЧЛиљђеПШжНҐпЉИеОЯе∞ЇеѓЄпЉЙ
й¶ЦеЕИзФ®cvWarpAffineеЃЮй™Ме∞ЖеЫЊеГПйАЖжЧґйТИжЧЛиљђdegreeиІТеЇ¶гАВ
//йАЖжЧґйТИжЧЛиљђеЫЊеГПdegreeиІТеЇ¶пЉИеОЯе∞ЇеѓЄпЉЙ
void rotateImage(IplImage* img, IplImage *img_rotate,int degree)
{
//жЧЛиљђдЄ≠ењГдЄЇеЫЊеГПдЄ≠ењГ
CvPoint2D32f center;
center.x=float (img->width/2.0+0.5);
center.y=float (img->height/2.0+0.5);
//иЃ°зЃЧдЇМзїіжЧЛиљђзЪДдїње∞ДеПШжНҐзЯ©йШµ
float m[6];
CvMat M = cvMat( 2, 3, CV_32F, m );
cv2DRotationMatrix( center, degree,1, &M);
//еПШжНҐеЫЊеГПпЉМеєґзФ®йїСиЙ≤е°ЂеЕЕеЕґдљЩеАЉ
cvWarpAffine(img,img_rotate, &M,CV_INTER_LINEAR+CV_WARP_FILL_OUTLIERS,cvScalarAll(0) );
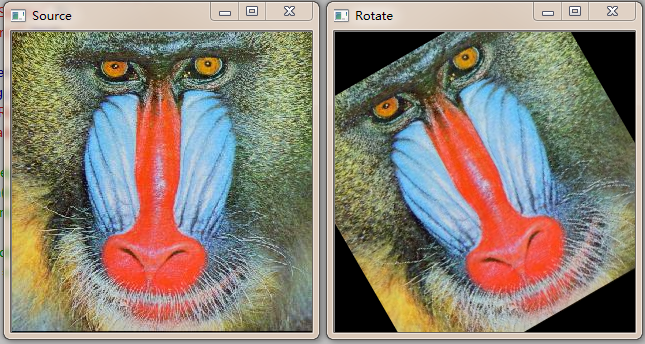
}йАЖжЧґйТИжЧЛиљђ30еЇ¶зїУжЮЬпЉЪ
ињЩйЗМжИСдїђе∞ЖжЦ∞зЪДеЫЊеГПињШдњЭзХЩеОЯжЭ•зЪДеЫЊеГПе∞ЇеѓЄгАВињЩж†ЈзЪДжХИжЮЬжШЊзДґдЄН姙啚пЉМжИСдїђйАЪињЗиЃ°зЃЧзЫЄеЇФжФЊе§ІеЫЊеГПе∞ЇеѓЄгАВ
еЃЮиЈµпЉЪеЫЊеГПжЧЛиљђеПШжНҐпЉИдњЭзХЩеОЯеЫЊеЖЕеЃєпЉМжФЊе§Іе∞ЇеѓЄпЉЙ
йЬАи¶БиЃ°зЃЧжЦ∞еЫЊзЪДе∞ЇеѓЄпЉМз§ЇжДПеЫЊе¶ВдЄЛпЉЪ
жЙАдї•жЦ∞еЫЊsizeдЄЇпЉИwidth*cos(a)+height*sin(a), height*cos(a)+width*sin(a)пЉЙ
//жЧЛиљђеЫЊеГПеЖЕеЃєдЄНеПШпЉМе∞ЇеѓЄзЫЄеЇФеПШе§І
IplImage* rotateImage1(IplImage* img,int degree){
double angle = degree * CV_PI / 180.; // еЉІеЇ¶
double a = sin(angle), b = cos(angle);
int width = img->width;
int height = img->height;
int width_rotate= int(height * fabs(a) + width * fabs(b));
int height_rotate=int(width * fabs(a) + height * fabs(b));
//жЧЛиљђжХ∞зїДmap
// [ m0 m1 m2 ] ===> [ A11 A12 b1 ]
// [ m3 m4 m5 ] ===> [ A21 A22 b2 ]
float map[6];
CvMat map_matrix = cvMat(2, 3, CV_32F, map);
// жЧЛиљђдЄ≠ењГ
CvPoint2D32f center = cvPoint2D32f(width / 2, height / 2);
cv2DRotationMatrix(center, degree, 1.0, &map_matrix);
map[2] += (width_rotate - width) / 2;
map[5] += (height_rotate - height) / 2;
IplImage* img_rotate = cvCreateImage(cvSize(width_rotate, height_rotate), 8, 3);
//еѓєеЫЊеГПеБЪдїње∞ДеПШжНҐ
//CV_WARP_FILL_OUTLIERS - е°ЂеЕЕжЙАжЬЙиЊУеЗЇеЫЊеГПзЪДи±°зі†гАВ
//е¶ВжЮЬйГ®еИЖи±°зі†иРљеЬ®иЊУеЕ•еЫЊеГПзЪДиЊєзХМе§ЦпЉМйВ£дєИеЃГдїђзЪДеАЉиЃЊеЃЪдЄЇ fillval.
//CV_WARP_INVERSE_MAP - жМЗеЃЪ map_matrix жШѓиЊУеЗЇеЫЊеГПеИ∞иЊУеЕ•еЫЊеГПзЪДеПНеПШжНҐпЉМ
cvWarpAffine( img,img_rotate, &map_matrix, CV_INTER_LINEAR | CV_WARP_FILL_OUTLIERS, cvScalarAll(0));
return img_rotate;
}
еЃЮиЈµпЉЪеЫЊеГПжЧЛиљђеПШжНҐпЉИдњЭзХЩеОЯеЫЊеЖЕеЃєпЉМжФЊе§Іе∞ЇеѓЄпЉЙ-2
иѓХдЄАдЄЛзФ®cvGetQuadrangleSubPixеЗљжХ∞пЉЪ
//жЧЛиљђеЫЊеГПеЖЕеЃєдЄНеПШпЉМе∞ЇеѓЄзЫЄеЇФеПШе§І
IplImage* rotateImage2(IplImage* img, int degree)
{
double angle = degree * CV_PI / 180.;
double a = sin(angle), b = cos(angle);
int width=img->width, height=img->height;
//жЧЛиљђеРОзЪДжЦ∞еЫЊе∞ЇеѓЄ
int width_rotate= int(height * fabs(a) + width * fabs(b));
int height_rotate=int(width * fabs(a) + height * fabs(b));
IplImage* img_rotate = cvCreateImage(cvSize(width_rotate, height_rotate), img->depth, img->nChannels);
cvZero(img_rotate);
//дњЭиѓБеОЯеЫЊеПѓдї•дїїжДПиІТеЇ¶жЧЛиљђзЪДжЬАе∞Пе∞ЇеѓЄ
int tempLength = sqrt((double)width * width + (double)height *height) + 10;
int tempX = (tempLength + 1) / 2 - width / 2;
int tempY = (tempLength + 1) / 2 - height / 2;
IplImage* temp = cvCreateImage(cvSize(tempLength, tempLength), img->depth, img->nChannels);
cvZero(temp);
//е∞ЖеОЯеЫЊе§НеИґеИ∞дЄіжЧґеЫЊеГПtmpдЄ≠ењГ
cvSetImageROI(temp, cvRect(tempX, tempY, width, height));
cvCopy(img, temp, NULL);
cvResetImageROI(temp);
//жЧЛиљђжХ∞зїДmap
// [ m0 m1 m2 ] ===> [ A11 A12 b1 ]
// [ m3 m4 m5 ] ===> [ A21 A22 b2 ]
float m[6];
int w = temp->width;
int h = temp->height;
m[0] = b;
m[1] = a;
m[3] = -m[1];
m[4] = m[0];
// е∞ЖжЧЛиљђдЄ≠ењГзІїиЗ≥еЫЊеГПдЄ≠йЧі
m[2] = w * 0.5f;
m[5] = h * 0.5f;
CvMat M = cvMat(2, 3, CV_32F, m);
cvGetQuadrangleSubPix(temp, img_rotate, &M);
cvReleaseImage(&temp);
return img_rotate;
}

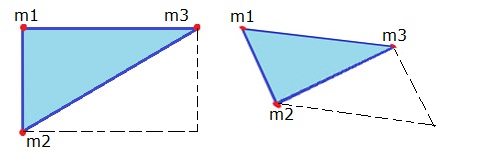
еЃЮиЈµпЉЪеЫЊеГПжФЊе∞ДеПШжНҐпЉИйАЪињЗдЄЙзВєз°ЃеЃЪеПШжНҐзЯ©йШµпЉЙ
еЬ®OpenCV 2.3зЪДеПВиАГжЙЛеЖМдЄ≠гАКopencv_tutorialsгАЛдїЛзїНдЇЖеП¶дЄАзІНз°ЃеЃЪеПШжНҐзЯ©йШµзЪДжЦєж≥ХпЉМйАЪињЗдЄЙдЄ™зВєеПШжНҐзЪДеЗ†дљХеЕ≥з≥їжШ†е∞ДеЃЮзО∞еПШжНҐгАВ
еПШжНҐз§ЇжДПеЫЊе¶ВдЄЛпЉЪ
еН≥йАЪињЗдЄЙдЄ™зВєе∞±еПѓдї•з°ЃеЃЪдЄАдЄ™еПШжНҐзЯ©йШµгАВпЉИзߩ嚥еПШжНҐеРОдЄАеЃЪдЄЇеє≥и°МеЫЫ茺嚥пЉЙ
дї•дЄЛжШѓеЯЇдЇОOpenCV 2.3зЪДдї£з†БпЉИйЬАиЗ≥е∞С2.0дї•дЄКзЙИжЬђзЪДжФѓжМБпЉЙ
int main( )
{
Point2f srcTri[3];
Point2f dstTri[3];
Mat rot_mat( 2, 3, CV_32FC1 );
Mat warp_mat( 2, 3, CV_32FC1 );
Mat src, warp_dst, warp_rotate_dst;
//иѓїеЕ•еЫЊеГП
src = imread( "baboon.jpg", 1 );
warp_dst = Mat::zeros( src.rows, src.cols, src.type() );
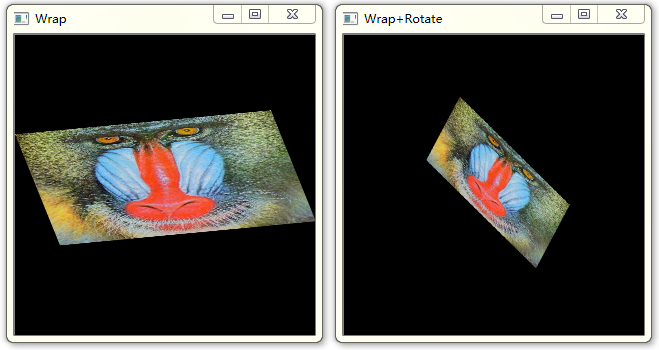
// зФ®3дЄ™зВєз°ЃеЃЪAдїње∞ДеПШжНҐ
srcTri[0] = Point2f( 0,0 );
srcTri[1] = Point2f( src.cols - 1, 0 );
srcTri[2] = Point2f( 0, src.rows - 1 );
dstTri[0] = Point2f( src.cols*0.0, src.rows*0.33 );
dstTri[1] = Point2f( src.cols*0.85, src.rows*0.25 );
dstTri[2] = Point2f( src.cols*0.15, src.rows*0.7 );
warp_mat = getAffineTransform( srcTri, dstTri );
warpAffine( src, warp_dst, warp_mat, warp_dst.size() );
/// жЧЛиљђзЯ©йШµ
Point center = Point( warp_dst.cols/2, warp_dst.rows/2 );
double angle = -50.0;
double scale = 0.6;
rot_mat = getRotationMatrix2D( center, angle, scale );
warpAffine( warp_dst, warp_rotate_dst, rot_mat, warp_dst.size() );
////OpenCV 1.0зЪД嚥еЉП
//IplImage * img=cvLoadImage("baboon.jpg");
//IplImage *img_rotate=cvCloneImage(img);
//CvMat M =warp_mat;
//cvWarpAffine(img,img_rotate, &M,CV_INTER_LINEAR+CV_WARP_FILL_OUTLIERS,cvScalarAll(0) );
//cvShowImage("Wrap2",img_rotate);
namedWindow( "Source", CV_WINDOW_AUTOSIZE );
imshow( "Source", src );
namedWindow( "Wrap", CV_WINDOW_AUTOSIZE );
imshow( "Wrap", warp_dst );
namedWindow("Wrap+Rotate", CV_WINDOW_AUTOSIZE );
imshow( "Wrap+Rotate", warp_rotate_dst );
waitKey(0);
return 0;
}еПШжНҐзїУжЮЬпЉЪ
еЖЩеЬ®жЬАеРОзЪДдЄАзВєзВєйЧ≤иѓЭ
дєЛеЙНдЄАзЫізФ®зЪД2.1зЪДзЙИжЬђпЉМеРОжЭ•и£ЕдЇЖ2.3пЉМеП™жШѓеРђиѓі2.3еЊИеЉЇе§ІпЉМдљЖжИСеИЪеЉАеІЛе≠¶пЉМзФ®зЪДдєЯеЯЇз°АпЉМеЃМеЕ®ж≤°жДЯиІЙеЗЇдЄНеРМгАВзЫіеИ∞дїК姩圚зДґзЬЛеИ∞дЇЖ2.3зЪДжЙЛеЖМпЉМжЙНеПСзО∞дїО2.0еЉАеІЛеЗљжХ∞еТМеЯЇжЬђзїУжЮДйГљжЬЙдЇЖеЊИе§ІзЪДжФєеПШпЉМиАМжИСдЄАзЫіињШжШѓзФ®зЪД1.0й£Ож†ЉзЪДеЗљжХ∞пЉИжѓФе¶ВcvMatпЉМcvLoadImageпЉЙгАВжИСзЪДдЄ§дЄ™е≠¶дє†еЈ•еЕЈгАКLearnning OpenCVгАЛеТМгАКOpenCVдЄ≠жЦЗеПВиАГжЙЛеЖМгАЛйГљжШѓеЯЇдЇО1.0зЪДпЉМињЩдєЯжШѓжИСеИ∞дїК姩жЙНзЬЛеИ∞MatпЉМзДґеРОзЫіжΕ襀жГКиЙ≥еИ∞дЇЖгАВ
еИЂдЇЇжАїзїУеЗЇжЭ•зЪДдЄЬи•њиГљеЄЃеК©жИСдїђеЬ®дЄАеЉАеІЛињЕйАЯеЕ•йЧ®пЉМдљЖи¶Бе≠¶жЈ±пЉМе≠¶з≤ЊпЉМзїИељТињШжШѓи¶БиЗ™еЈ±еОїеК™еКЫжМЦзЪДгАВ
еИЖдЇЂеИ∞пЉЪ






зЫЄеЕ≥жО®иНР
еЯЇдЇОOpenCVзЪДеЫЊеГПз©ЇйЧіеПШжНҐпЉЪжЧЛиљђпЉМзЉ©жФЊпЉМжЦЬеИЗ еПВиАГеНЪеЃҐпЉЪhttp://blog.csdn.net/xiaowei_cqu/article/details/7616044
дљњзФ®OpenCvSharpдЄ≠зЪДеЫЊеГПе§ДзРЖеЗљжХ∞пЉМеЃЮзО∞еє≥зІїгАБжЧЛиљђгАБйХЬеГПгАБжШ†е∞Дз≠ЙеКЯиГљпЉМеєґеЬ®pictureboxдЄКжШЊз§ЇзїУжЮЬпЉМжЬАеРОе∞ЖеЫЊзЙЗдњЭе≠ШеИ∞жЬђеЬ∞з£БзЫШгАВ
еЉАеПСзОѓеҐГдЄЇQT5.8+opencv3.2пЉМдЄїи¶БеЃЮзО∞дЇЖеЫЊеГПеЗ†дљХеПШжНҐпЉМеМЕжЛђеЫЊеГПеє≥зІїпЉМеЫЊеГПжЧЛиљђпЉМеЫЊеГПзЉ©жФЊгАВ
Opencv еЫЊеГПеЗ†дљХеПШжНҐ
36.OpenCVеЫЊеГПеЗ†дљХеПШжНҐдЄЗе≠Чиѓ¶иІ£пЉИеє≥зІїзЉ©жФЊжЧЛиљђгАБйХЬеГПдїње∞ДйАПиІЖпЉЙ
еЯЇдЇОVS2013 opencv3еЖЩеЗЇжЭ•зЪДжЬЙеЕ≥еЫЊеГПжЧЛиљђгАБзЉ©жФЊгАБеЖЕеЗєгАБе§ЦеЗЄз≠ЙеЫЊеГПзЪДеЗ†дљХеПШжНҐзЪДдї£з†Б
жСШи¶БиІЖеЫЊиЃҐйШЕеИЖз±їпЉЪзЫЃељХ(?гАРOpenCVеЕ•йЧ®жХЩз®ЛдєЛеНБеЫЫгАСOpenCVйЬНе§ЂеПШжНҐпЉЪйЬНе§ЂзЇњеПШжНҐпЉМйЬНе§ЂеЬЖеПШжНҐеРИиЊС71621дЇЇйШЕиѓїиѓДиЃЇ(93)жФґиЧПдЄЊжК•жЬђз≥їеИЧжЦЗзЂ†зФ±@жµЕ奮_
жАїзїУдЄАдЄЛжЬАињСзЬЛзЪДеЕ≥дЇОopencvеЫЊеГПеЗ†дљХеПШжНҐзЪДдЄАдЇЫзђФиЃ∞. ињЩжШѓеОЯеЫЊ: 1.еє≥зІї import cv2 import numpy as np img = cv2.imread(image0.jpg, 1) imgInfo = img.shape height = imgInfo[0] width = imgInfo[1] mode =...
еЖЩдЇЖдЄ™OpencvеЫЊеГПзЉ©жФЊжЧЛиљђзЪДжЇРз†БпЉМдїЕдЊЫеПВиАГпЉМеЕНиієжПРдЊЫ
OpenCV-PythonеЫЊеГПйАПиІЖеПШжНҐе§ДзРЖпЉЪй≠ФеПШиљ¶зЙМж°ИдЊЛ.rar
жЬђжЦЗеЃЮдЊЛдЄЇе§ІеЃґеИЖдЇЂдЇЖOpenCVеЫЊеГПеЗ†дљХеПШжНҐдєЛйАПиІЖеПШжНҐзЪДеЕЈдљУдї£з†БпЉМдЊЫе§ІеЃґеПВиАГпЉМеЕЈдљУеЖЕеЃєе¶ВдЄЛ 1. еЯЇжЬђеОЯзРЖ ¬†йАПиІЖеПШжНҐпЉИPerspective TransformationпЉЙзЪДжЬђиі®жШѓе∞ЖеЫЊеГПжКХељ±еИ∞дЄАдЄ™жЦ∞зЪДиІЖеє≥йЭҐпЉМеЕґйАЪзФ®еПШжНҐеЕђеЉПдЄЇпЉЪ пЉИuпЉМv...
еЯЇдЇОOpenCVзЪДеЫЊеГПдїње∞ДеПШжНҐпЉМеМЕжЛђеЫЊеГПзЪДжЧЛиљђз≠ЙгАВ
ињЩжШѓжИСзФ®opencvеЖЩзЪД еЫЊеГПжЧЛиљђдЄОзЉ©жФЊ2008.net
OpenCV 3иЃ°зЃЧжЬЇиІЖиІЙпЉЪPythonиѓ≠и®АеЃЮзО∞ пЉИJoe MinichinoпЉЙ
opencv еЫЊеГПжИ™еПЦ еЫЊеГПжШЊз§Ї еЫЊеГПеПШжНҐ еПМзЇњжАІ жЬАйВїињСжПТеАЉ еЫЊеГПзЉ©жФЊ opencv еЫЊеГПжИ™еПЦ еЫЊеГПжШЊз§Ї еЫЊеГПеПШжНҐ еПМзЇњжАІ жЬАйВїињСжПТеАЉ еЫЊеГПзЉ©жФЊ opencv еЫЊеГПжИ™еПЦ еЫЊеГПжШЊз§Ї еЫЊеГПеПШжНҐ еПМзЇњжАІ жЬАйВїињСжПТеАЉ еЫЊеГПзЉ©жФЊ
еЯЇдЇОopencvеЖЩзЪДеЫЊеГПзЪДжЧЛиљђдЄОзЉ©жФЊпЉМжХИжЮЬжѓФиЊГhigh
opencvеЫЊеГПе§ДзРЖ opencvеЫЊеГПе§ДзРЖ_opencvеЫЊеГПе§ДзРЖзЃЧж≥ХдєЛдїње∞ДеПШжНҐ_еМЕжЛђжЧЛиљђ+еє≥зІї+зЉ©жФЊ+зїДеРИеПШжНҐ
еМЕеРЂдЄ§дЄ™е∞ПеЃЮй™МпЉЪеЫЊеГПзЉ©жФЊпЉМеЫЊеГПеПШ嚥гАВзФ®c++гАБopencvеЖЩзЪДгАВињРи°МжЧґж≥®жДПеЫЊеГПж†ЉеЉПе§Іе∞П
OpenCVеЫЊеГПе§ДзРЖ,еЫЊеГПжЧЛиљђ.еЃЮзО∞еѓєиѓїеЕ•зЪДеЫЊеГПињЫи°МиЗ™еЃЪдєЙжЧЛиљђ